
Представлен комплексный обзор современных исследований в области беспилотных летательных аппаратов (БПЛА) и беспилотных транспортных систем. Рассмотрены ключевые направления развития беспилотной техники, включая вопросы надежности, управления движением, радиолокационного моделирования и практического применения.
Особое внимание уделено методам распределения требований к надежности БПЛА между комплектующими изделиями, а также алгоритмам оптимального управления группами беспилотных автомобилей. Представлены результаты разработки имитатора радиолокационных сигналов для малоразмерных БПЛА и исследования дальностно-доплеровских отражений при радиолокационном зондировании.
В обзоре освещены практические аспекты применения беспилотных технологий: мониторинг объектов информатизации; контроль соблюдения ПДД; атмосферные наблюдения; решение коммунальных задач; организация каналов связи.
Значительное внимание уделено вопросам модернизации БПЛА, включая разработку систем вертикального взлета и посадки, а также внедрению адаптивных методов управления на основе динамического программирования. Определены перспективы развития беспилотных авиационных систем и новые технологические решения в данной области.
Представлены документы из фонда РНТБ, а также аннотированные описания электронных ресурсов и ссылки на полные тексты.
С полными текстами статей можно ознакомиться в зале информационно-справочной службы, комната 613, и в читальном зале периодических изданий, комната 614. Телефон для справок +375 17 226 61 88.

Блануца, М. Г. Распределение требований к надежности беспилотного летательного аппарата между его комплектующими изделиями / М. Г. Блануца // Контроль качества продукции. – 2025. – № 7. – С. 32–35.
Рассмотрен метод задания требований к надежности беспилотного летательного аппарата путем их распределения между его комплектующими изделиями. Представлен математический аппарат, с помощью которого можно на этапе проектирования провести расчеты, позволяющие решить данный вопрос таким образом, чтобы при соблюдении установленных требований затраты на обеспечение надежности системы были минимальными.
Кабанов, С. А. Оптимальное управление движением группы беспилотных автомобилей / С. А. Кабанов, Ф. В. Митин // Мехатроника, автоматизация, управление. – 2025. – № 3. – С. 147–154.
Решена задача управления беспилотным автомобилем в детерминированной постановке. Для решения двухточечной задачи, возникающей из принципа максимума, использован алгоритм Крылова–Черноусько. Показана затруднительность его применения для формирования управления в реальном времени. Для применения концепции «гибких траекторий» использован алгоритм с прогнозирующей моделью. Представлены результаты численного моделирования, показывающие преимущества данного алгоритма. Групповое движение беспилотных наземных аппаратов реализовано при использовании подхода «ведущий – ведомый». Указано, что движение ведомого объекта управления обеспечивается по траектории, ориентированной на перемещение ведущего. Приведены результаты численного моделирования, показывающие возможность использования предложенного алгоритма для осуществления управления группой беспилотных автомобилей при различных начальных и конечных условиях. Алгоритм успешно применен при наличии штрафной зоны для ведомого транспортного средства. Показана возможность одновременного использования нескольких ведомых беспилотных автомобилей.

Костромицкий, С. М. Моделирование радиолокационных сигналов беспилотных летательных аппаратов при негауссовских распределениях комплексных амплитуд / С. М. Костромицкий, Д. С. Нефёдов, А. А. Дятко // Доклады Национальной академии наук Беларуси. – 2025. – Т. 69, № 1. – С. 64–75.
Разработана структура и алгоритмы функционирования имитатора радиолокационных сигналов, отраженных от малоразмерных беспилотных летательных аппаратов (БПЛА). Отмечено, что особенностью имитатора является возможность формирования произвольно коррелированных реализаций входного воздействия радиолокационной станции для случаев, когда случайная амплитуда отраженного сигнала (ОС) имеет распределение Рэлея, Накагами, Вейбулла или логнормальное распределение. Представлены аналитические выражения для расчета параметров плотности распределения вероятности, а также формирования отсчетов случайной амплитуды ОС с заданным законом распределения из отсчетов исходных реализаций гауссовского процесса. Предусмотрена нормировка средней мощности ОС к среднему значению эффективной поверхности рассеяния моделируемой цели и обеспечение заданного времени корреляции флуктуаций комплексных амплитуд ОС. Параметры формируемых реализаций ОС соответствуют значениям реальных радиолокационных характеристик малоразмерных БПЛА, полученных экспериментально. Применением предложенного имитатора является анализ эффективности вновь разрабатываемых и известных алгоритмов обнаружения БПЛА методом математического моделирования.

Кузин, П. И. Адаптивный мониторинг объектов информатизации беспилотным летательным аппаратом с прогнозированием помеховой обстановки / П. И. Кузин, В. А. Липатников, А. А. Шевченко // Телекоммуникации. – 2025. – № 1. – С. 8–18.
Предложена реализация способа адаптивного мониторинга объектов информатизации беспилотным летательным аппаратом в ультракоротковолновом диапазоне с прогнозированием сложной сигнально-помеховой обстановки с учетом антропогенного воздействия. Предложенный способ обеспечит сокращение временных затрат на обеспечение управления летательным аппаратом при изменении внешней среды, а также повысит качество, своевременность и достоверность мониторинга объектов информатизации в интересах оператора пункта управления беспилотным летательным аппаратом. Качество управления беспилотным летательным аппаратом гарантировано, если обеспечивается энергетическая доступность при мониторинге объектов информатизации с вероятностью электромагнитной доступности не менее 0,9. Адаптивный мониторинг должен обеспечить своевременность принятия решения на основе измерения значений внешних параметров, построения прогнозной модели и принятия решения на управление. Отмечено, что ведение управления беспилотным летательным аппаратом обеспечивается оператором на стационарном или подвижном пункте управления. Эффективность функционирования напрямую зависит от выбора варианта построения и приоритета мониторинга в интересах оператора при решении специальных задач в труднодоступных территориях.

Муратов, И. В. Применение БПЛА для выявления нарушений ПДД / И. В. Муратов // Автоматизация. Современные технологии. – 2025. – № 1. – С. 22–26.
Рассмотрено применение беспилотных летательных аппаратов (БПЛА) для выявления нарушений правил дорожного движения (ПДД). Обоснована актуальность применения БПЛА на дорогах. Представлена структура комплекса БПЛА, используемого ГИБДД. Выделены направления применения БПЛА в сфере обеспечения безопасности дорожного движения. Показано, что характеристики таких БПЛА разделяются на технические (как устройства) и управления данными с учетом специфики обеспечения безопасности дорожного движения. Сделан вывод, что применение БПЛА, осуществляющего оперативную запись ситуации на месте дорожно-транспортного происшествия (ДТП), позволяет зафиксировать его картину, смоделировать движение транспортных средств до, во время и после ДТП, что способствует повышению безопасности движения и направлено как на выявление нарушений ПДД, так и на их профилактику.

Наблюдения в планетарном пограничном слое атмосферы на основе беспилотной платформы / А. Щавлев, И. Аниськов, Ю. Семак [и др.] // Наука и инновации. – 2025. – № 11. – С. 65–72.
Рассмотрена концепция подсистемы наблюдения за атмосферой в планетарном пограничном слое на основе малоразмерной беспилотной воздушной платформы самолетного типа. Проанализированы технические возможности и преимущества данной системы, а также рассмотрены классические методы атмосферного наблюдения и их основные ограничения. Кроме того, выявлены перспективные направления дальнейшего развития применения беспилотных воздушных платформ в области мониторинга атмосферы.

Рязанцев, Л. Б. Моделирование дальностно-доплеровских отражений от земной поверхности при радиолокационном зондировании с борта летательного аппарата / Л. Б. Рязанцев, О. А. Бабич, Д. Ю. Маклаков // Цифровая обработка сигналов. – 2025. – № 1. – С. 27–33.
Исследованы дальностно-доплеровские портреты земной поверхности при зондировании когерентными сигналами радиолокатора, размещенного на борту летательного аппарата. Выявлены закономерности формирования портретов при различных характеристиках и ориентации антенн в пространстве, параметрах зондирующих излучений и отражательных свойств поверхности. Предложено использовать разработанную модель для оценки параметров полета носителя РЛС в интересах решения задач автономной навигации.

Серкин, Б. А. Модернизация беспилотного летательного аппарата самолетного типа для обеспечения вертикального взлета и посадки / Б. А. Серкин // Известия высших учебных заведений. Приборостроение. – 2025. – Т. 68, № 1. – С. 50–55.
Представлены результаты модернизации беспилотного летательного аппарата самолетного типа. Для целей модернизации разработаны и изготовлены узлы беспилотного летательного аппарата самолетного типа, обеспечивающие вертикальный взлет и посадку самолета. Приведены результаты летных испытаний, показывающие целесообразность модификации готового воздушного судна до самолета вертикального взлета и посадки за счет уменьшения дистанции взлета и посадки и возможности переходить в режим висения, а также увеличения крейсерской скорости, что позволяет быстрее выполнять полетное задание.

Создание беспилотной роботизированной платформы как способ решения ряда коммунальных задач / Е. В. Гражданцев, О. Н. Губарь, А. Ю. Ахпашев [и др.] // Грузовик. – 2025. – № 2. – С. 42–46.
Рассмотрен ряд аспектов, влияющих на возможность организации работы по проектированию и созданию беспилотных коммунальных технологических платформ и встраивания таких систем в городскую среду: массогабаритные характеристики технологических платформ, алгоритмы функционирования основных систем управления, элементы позиционирования, датчики и дополнительное оборудование для организации машинного зрения.

Чиров, Д. С. Построение каналов связи с БПЛА среднего и дальнего радиуса действия / Д. С. Чиров, М. В. Иванкович, И. Л. Гололобов // Электросвязь. – 2025. – № 4. – С. 47–52.
Рассмотрены основные подходы к организации связи с БПЛА среднего и дальнего радиуса действия для их интеграции в Единую систему организации воздушного движения Российской Федерации. Показано, что для организации линии управления и контроля БПЛА (линия C2 в терминологии ИКАО) целесообразно использовать аппаратуру связи на базе технологии OFDM. При этом отмечено, что технического решения для оборудования линии С2 в полосе частот 5030–5091 МГц, утвержденного как международный стандарт, в настоящее время нет. В качестве прототипа такого оборудования для линии С2 предложено использовать оборудование широкополосного многостанционного радиодоступа, основанное на стандарте LTE и доработанное с учетом специфики линии С2. С помощью анализа данной технологии выявлено, что в данном случае возможно реализовать линию С2 в полосе частот 5030–5091 МГц на дальностях до 100 км.

A review of unmanned vehicle control with adaptive dynamic programming implementations / Hao Liu, Xinning Yi, Deyuan Liu, Kimon P. Valavanis / Journal of Intelligent & Robotic Systems. – 2025. – Vol. 111. – Article number 10. – URL: https://link.springer.com/article/10.1007/s10846-024-02207-y#Abs1 (date of access: 17.12.2025).
Переведенное заглавие: Управление беспилотным транспортным средством с использованием адаптивного динамического программирования: обзор.
Исследованы оптимальные схемы управления беспилотными транспортными средствами при помощи адаптивного динамического программирования (ADP). Оптимальное управление системой может быть получено путем решения уравнения Гамильтона–Якоби–Беллмана с использованием методов управления на основе динамического программирования. Для устранения сложностей и неопределенных помех в динамике беспилотных транспортных средств предложены методы управления на основе адаптивного динамического программирования.

Ariante, G. Unmanned aircraft systems (UASs): current state, emerging technologies, and future trends / G. Ariante, G. Del Core // Drones. – 2025. – Vol. 9, iss. 1. – Article number: 59. – URL: https://doi.org/10.3390/drones9010059 (date of access: 17.12.2025).
Переведенное заглавие: Беспилотные авиационные системы (БПЛА): современное состояние, новые технологии и будущие тенденции.
Рассмотрены последние достижения в области беспилотных летательных аппаратов, особое внимание уделено обновленным правилам, определениям, вспомогательным технологиям и городской воздушной мобильности. Представлен обзор беспилотных авиационных систем, их ключевые характеристики и основные области применения.
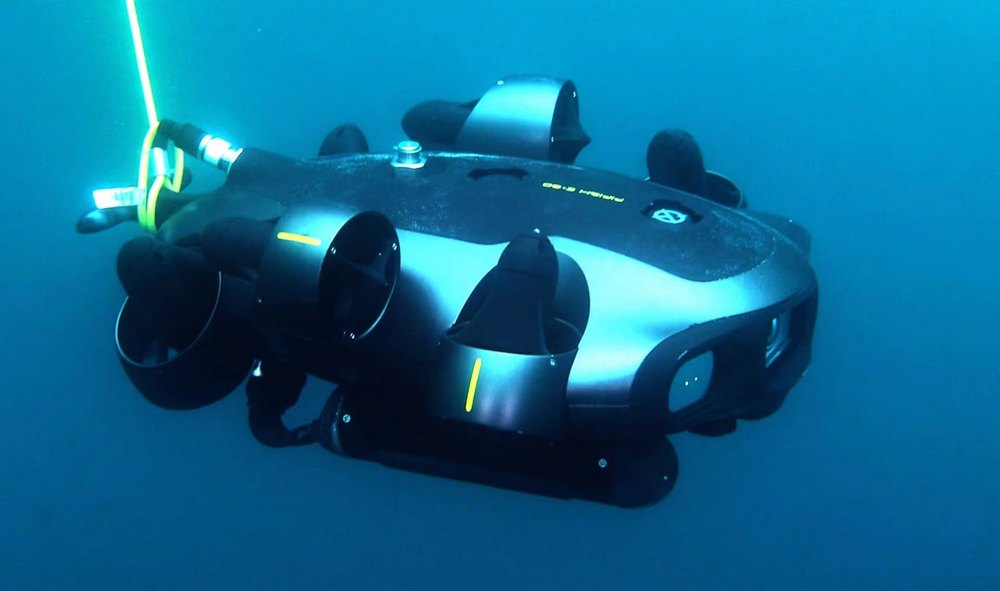
Biomimetic propulsion system efficiency for unmanned underwater vehicle / P. Szymak, P. Piskur, R. Kot [et al.] // Scientific Reports. – 2025. – Vol. 15. – Article number: 11086. – URL: https://www.nature.com/articles/s41598-025-95702-7 (date of access: 17.12.2025).
Переведенное заглавие: Эффективность биомиметической установки для беспилотного подводного аппарата.
Представлены данные экспериментального исследования. Испытания проводились в лабораторном водном туннеле, оборудованном датчиком прямого измерения силы и системой лазерной анемометрии по изображениям частиц. Протестированы различные параметры управления. Разработана двигательная установка с низким уровнем гидроакустического шума и высокой энергетической эффективностью.
Вы можете заказать представленные на выставке издания, используя форму. Мы забронируем их для вас и сообщим, в каком читальном зале они будут доступны.
Заказать издания может только читатель РНТБ.
Вы также можете заказать фрагменты полных текстов, воспользовавшись услугой электронная доставка документов либо услугой электронный абонемент (услуги платные).